
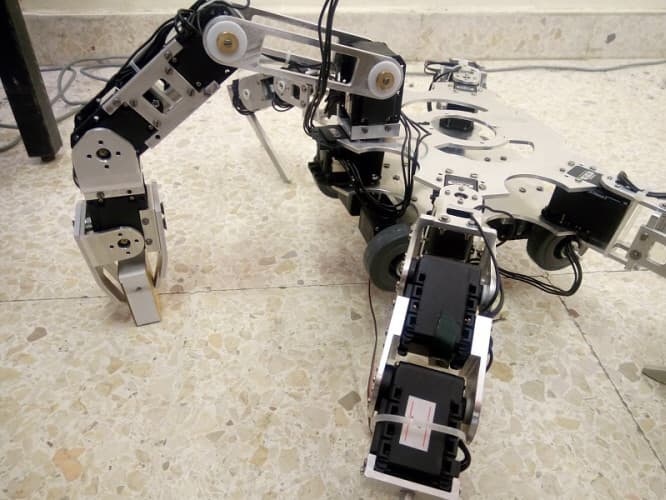
صمّم "جميل ليوس" روبوتاً هجيناً رباعي الأرجل شبيهاً ببنية العنكبوت، ذا قدرة حركية كبيرة، وله استخدامات متعددة؛ كالتقاط العينات، وتفكيك الألغام.
مدونة وطن "eSyria" التقت بتاريخ 12 أيار 2017، المهندس "ليوس" خريج "المعهد العالي للعلوم التطبيقية والتكنولوجيا"، اختصاص ميكاترونيكس، الذي قال عن إنجازه: «هو عبارة عن روبوت هحين يدمج ثلاثة أنماط؛ فهو روبوت رباعي الأرجل يمكنه التحول من عربة مدولبة رباعية الدفع إلى روبوت رباعي الأرجل يشبه العقرب من حيث الشكل، وبذلك يتمكن من السير بسرعة على أرض مستوية، ثم الانتقال إلى وضعية أخرى في حال السير على أرض وعرة أو متعرجة، ويمتلك ذراعاً ذات أربع درجات حرة كي تضيف إليه قدرة أكبر على تجاوز العواقب وتسلقها. الصعوبة في الروبوتات الرباعية الأرجل تكمن في التوازن، حيث يجب دائماً تغيير إحداثيات مركز العطالة للروبوت ليقع في مثلث التوازن المتشكل من الأرجل الثلاث المتموضعة على الأرض أثناء تحريكه، وقمنا بإنجاز ونمذجة الدراسة الحركية المؤلفة من أربع سلاسل حركية، وحساب النموذج الهندسي المباشر والعكسي لكل رجل وللروبوت كله».
قمنا بدراسة فضاء العمل للأرجل وتوليد المسار الأنسب لحركة كل رجل، حيث تم التحكم بسرعة وموضع كل محرك مع الزمن، وقمنا بإنجاز التصميم الميكانيكي الأنسب وإيجاد الحلول الميكانيكية الأبسط القابلة للتنفيذ، والأوفر من حيث التكلفة والزمن، مع الأخذ بعين الاعتبار الدراسات الإنشائية لكافة القطع الميكانيكية، وصمّمنا دارة تصميم كهربائية للتحكم بالمحركات المستخدمة ودارة لا سلكية للتخاطب مع الروبوت عن بعد. وتم بناء واجهة تخاطبيه برمجية تتيح للمستخدم التحكم بالروبوت بمرونة كبيرة
وعن مراحل العمل، قال "ليوس": «قمنا بدراسة فضاء العمل للأرجل وتوليد المسار الأنسب لحركة كل رجل، حيث تم التحكم بسرعة وموضع كل محرك مع الزمن، وقمنا بإنجاز التصميم الميكانيكي الأنسب وإيجاد الحلول الميكانيكية الأبسط القابلة للتنفيذ، والأوفر من حيث التكلفة والزمن، مع الأخذ بعين الاعتبار الدراسات الإنشائية لكافة القطع الميكانيكية، وصمّمنا دارة تصميم كهربائية للتحكم بالمحركات المستخدمة ودارة لا سلكية للتخاطب مع الروبوت عن بعد. وتم بناء واجهة تخاطبيه برمجية تتيح للمستخدم التحكم بالروبوت بمرونة كبيرة».


وعن استخداماته أوضح "ليوس": «بحجمه الصغير الحالي، يمكنه التوغل ضمن الأراضي الوعرة بواسطة الأرجل المدعومة بالذارع التي تمكنه من تصحيح وضعيته في حال وقع أو علق بمكان صعب. ويمكن للروبوت الدخول إلى المناطق التي يصعب على الإنسان الوصول إليها لأنها خطرة أو ملوثة، وأخذ عينات عن طريق الذراع والقيام بالمهمات المطلوبة منه، كما يمكنه السير في الأراضي التي لا يمكن للإنسان الذهاب إليها مثل المريخ، وإذا تم تصنيع نسخة مضخمة منه، يمكنه الدخول ضمن منطقة منكوبة؛ كالمناطق المضروبة بالزلازل، حيث يمكنه السير فوق الأنقاض وإزالتها، وإنقاذ الناس من تحتها».
وفي حديثنا مع المشرف على المشروع المهندس "عهد البدين"، قال: «تكمن أهمية الفكرة في تصميم روبوت هجين ذي قدرة حركية كبيرة، ولأول مرة يتم تطبيق فكرة الروبوت رباعي الأرجل في المعهد العالي أو حتى محلياً؛ وذلك لأن تطبيق المسارات اللازمة لحركة روبوت كهذا ليس بالأمر السهل. يمتلك الروبوت ذراعاً بأربع درجات حرية تمكنه من التقاط العينات؛ وهي تطبيق مباشر لمشروع المهندس "ليوس" في سنته الرابعة، حيث قام بتصنيع الذراع ودراستها كاملة، وإيجاد أفضل تصميم لها ليتمكن من تطبيقها في مشروع التخرج. تم تصنيع الروبوت كاملاً في المعهد العالي، وتصنيع دارة للتحكم وقيادة كافة المحركات، واستخدمنا تقنية البلوتوث للتحكم به لا سلكياً. بالنسبة للمهندس "ليوس"، فهو مثابر ومجدّ في عمله، ويسعى دائماً إلى التميز في عمله، ويمتلك أفكاراً مبتكرة ستدعمه في حياته المستقبلية».


يذكر أنّ "جميل ليوس" من مواليد "دمشق"، عام 1993، والمشروع هذا العام شارك بمعرض "دمشق التقاني المفتوح"، وحصل على أفضل تصميم.
