بإصرار وعزيمة صمم المهندس "أحمد الخطيب وزملاؤه "ياسر حورية" و"أحمد الحجار" روبوتاً متكيفاً يتم التحكم به عن طريق حركة اليد والأوامر الصوتية باستخدام الأوردينو ولغة البرمجة #C، لنيل الإجازة في هندسة الحواسيب، اختصاص تحكم وأتمتة.
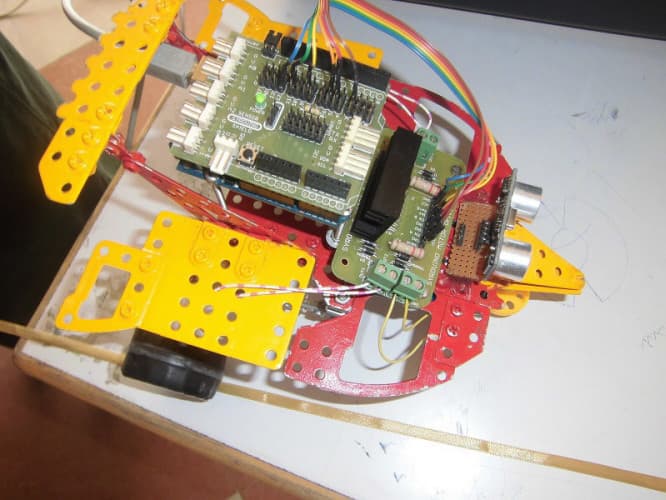
مدونة وطن "eSyria" وخلال جولتها في "معرض المشاريع السادس" بتاريخ 24 شباط 2015، الذي أقيم في كلية الهندسة الميكانيكية والكهربائية، والتقت المهندس "أحمد الخطيب" ليحدثنا عن مشروع تخرجه مع زملائه بالقول: «أحببنا أن نشارك بالمعرض لإفادة الطلبة من خلال تجربتنا، مشروعنا عبارة عن روبوت متكيف يتحكم به عن طريق حركة اليد والأوامر الصوتية، فكرة الروبوت الأساسية أن يقوم بعملية استكشاف للبيئة المحيطة به، وإدخاله إلى المناطق التي لا يستطيع الإنسان الدخول إليها، ولضيق الوقت عملنا على التحكم به باستعمال قطع الميكانو (meccano)؛ وهي قطع صغيرة سهلة التركيب، وتتميز بسهولة التعديل وفق البيئة المحيطة وإدخال أية تغييرات نريدها، ففي الطريق الأملس يستخدم برغي استناد، وفي الطريق الخشن تستخدم الدواليب، أما في البيئة الوعرة فيتم تركيب سلاسل حديدية للدواليب، ويتحكم بالروبوت بواسطة دارة الأوردينو (arduino) ولغة البرمجة #C.
المشروع مميز بين جميع المشاريع المعروضة، وهو متكامل في الجزء النظري والجزء التطبيقي، اعترضتهم صعوبات أثناء تنفيذ المشروع وهي تأمين قطع غير متواجدة، وقاموا بتأمينها من الخارج وبأسعار مرتفعة، واستطاعوا تخطيها بعزيمتهم وإصرارهم، وقاموا بتنظيم الوقت واستثماره استثماراً جيداً وكاملاً، حيث تم تقسيم العمل فيما بينهم، وجمع المعلومات وتنسيقها بتنظيم، والروبوت عبارة عن نموذج مصغر يمكن الاستفادة منه في مجالات الحياة المتنوعة، وتطويره واستخدامه في أماكن الحرائق والمناطق الخطرة، ولم يكتفوا بالتحكم بالروبوت عن طريق اليد فقط؛ بل أردوا التحكم به عن طريق الأوامر الصوتية ونجحوا في ذلك
آلية التحكم عن طريق اليد تتم من خلال تحريك اليد باستمرار أمام كاميرا "اللابتوب" أو الهاتف، أو أية كاميرا متوافرة في ظروف إضاءة معينة، وبحسب حركة اليد يتم الحصول على إحداثيات (Y, X)، (Y) لتحريك الروبوت إلى الأمام أو الخلف وبالاتجاهين، (X) إذا كانت قيمتها أكبر من الصفر تستخدم لتحريك الروبوت إلى اليمين أو اليسار، والرجوع بالاتجاه المعاكس يميناً أو يساراً، والالتفاف حول نفسه، ويتم إرسال الإحداثيات إلى الروبوت عن طريق الاتصال عبر البلوتوث، أما بالنسبة للتحكم بالروبوت عن طريق الأوامر الصوتية، فيتم نطق الكلمة أمام ميكروفون "اللابتوب" أو ميكرفون الهاتف المحمول، ويجب أن يكون هدوء تام في الغرفة لالتقاط الصوت، يقوم البرنامج بالتعرف إليها وكتابتها وتنفيذ الأمر المطلوب، نقوم بإعطاء الأمر من خلال الكلمات المتعارف عليها، مثل: GO أمر الذهاب، BACK أمر العودة، LEFT أمر التحرك إلى اليسار، RIGHT أمر التحرك إلى اليمين، ونقوم بإرسال الأوامر إلى الربوت عن بعد عن طريق دارة البلوتوث.



للروبوت فوائد عديدة، حيث يمكن جعله روبوتاً استكشافياً من خلال إضافة كاميرا وإدخاله إلى مناطق صعبة الوصول ويقوم بتصوير فيديو للمنطقة، وتتم مشاهدة الفيديو مباشرة على شاشة الكمبيوتر، ونستطيع التعديل في بناء الروبوت بإضافة أذرع روبوتية، لحمل غرض معين وجلبه».
الدكتورة "هيام خدام" المشرفة على مشروع التخرج، قالت: «المشروع مميز بين جميع المشاريع المعروضة، وهو متكامل في الجزء النظري والجزء التطبيقي، اعترضتهم صعوبات أثناء تنفيذ المشروع وهي تأمين قطع غير متواجدة، وقاموا بتأمينها من الخارج وبأسعار مرتفعة، واستطاعوا تخطيها بعزيمتهم وإصرارهم، وقاموا بتنظيم الوقت واستثماره استثماراً جيداً وكاملاً، حيث تم تقسيم العمل فيما بينهم، وجمع المعلومات وتنسيقها بتنظيم، والروبوت عبارة عن نموذج مصغر يمكن الاستفادة منه في مجالات الحياة المتنوعة، وتطويره واستخدامه في أماكن الحرائق والمناطق الخطرة، ولم يكتفوا بالتحكم بالروبوت عن طريق اليد فقط؛ بل أردوا التحكم به عن طريق الأوامر الصوتية ونجحوا في ذلك».


