تمكن "عهد البدين" من إنشاء أحد أهم المشاريع في مجال الروبوتات، مقتباساً فكرته من بنية العنكبوت، فصمم روبوتاً سداسي الأرجل بنافذة بيانية تحاكي الحركة في جميع الاتجاهات.
مدونة وطن "eSyria" التقت بتاريخ 6 نيسان 2015، المهندس "عهد البدين" خريج المعهد العالي للعلوم التطبيقية والتكنولوجيا، ليحدثنا عن تفاصيل مشروع تخرجه، ويقول: «صممت روبوتاً سداسي الأرجل متنقلاً "Hexapod Walking robot" سميته "SPIDY"، يتميز هذا النوع من الروبوتات بالاستقرار نظراً لعدد الأرجل، وتتم عملية سير روبوت وفق مبدأ (3X3)، أي ثلاثة أرجل على الأرض والثلاث الأخرى في الهواء وبالتناوب، وذلك لتحقيق إمكانية السير في جميع الاتجاهات والدوران أيضاً، واستوحيت الفكرة والتصميم من بنية العنكبوت لأنه يمتلك الخصائص التي نبحث عنها، ولكن بشكل أكثر بساطة وأقل تعقيداً؛ حيث تختلف بنية العنكبوت لأنه يحتوي على ثماني أرجل، بينما الروبوت بست أرجل.
للمشروع أهمية كبيرة حيث يستطيع جسم الروبوت الولوج إلى أماكن لا يمكن للإنسان الوصول إليها، مع إمكانية تجاوز العوائق المادية حتى ارتفاع 100مم. وأعتقد أنه يعد قفزة نوعية في مجال علوم الروبوتيك، ويتطلب من جميع المهتمين والمعنيين، المساهمة في تبني تطوير وإغناء هذه التجربة، لتنتقل من مشروع مخبري إلى منتجات بمهمات مختلفة
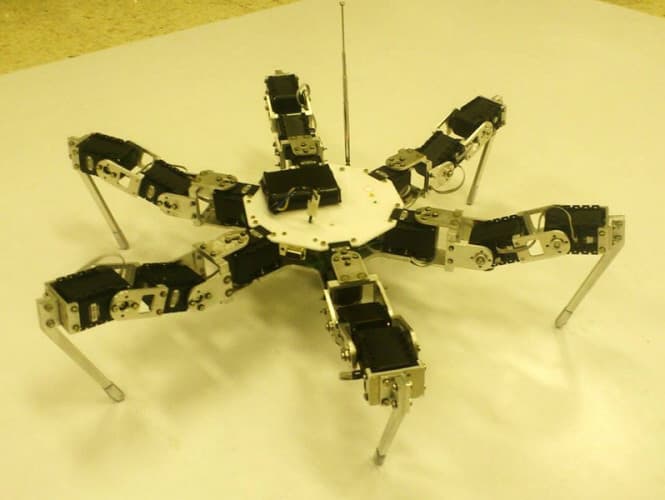
يتألف المشروع من دراسة نظرية وموسعة للروبوت، وتأتي في ثلاثة أقسام، الأول هو التصميم الميكانيكي؛ يتألف من ثمانية عشر محرك سيرفو، وكل ثلاثة محركات تقوم بتشكيل رجل للروبوت أي ست أرجل، وتحصل المحركات على التغذية من البطاريات، وقد استعملت البطارية المؤلفة من ثلاث خلايا قابلة للشحن، وجسم الروبوت يتكون من قاعدة سفلية مهمتها ربط الأرجل الست، والقاعدة العلوية هي غطاء، أما الشق الإلكتروني فيتضمن آلية وكيفية التحكم بالروبوت سلكياً أو لا سلكياً، بينما قمت بالشق البرمجي ببناء واجهة تخاطبية على الحاسوب بلغة #C، من خلالها نتحكم بالروبوت، حيث نقوم بإرسال الأوامر إلى معالج الدارة الرئيسة في الروبوت، كما تحتوي محاكاة باستخدام مكتبة "OpenTk"، نستطيع بواسطة الواجهة تغيير اتجاه السير، وارتفاع الخطوة ومقدارها، ودور الحركة، وتغيير السرعة، وفائدة المحاكاة أنها تسمح بتجريب أي حركة قبل تنفيذها على أرض الواقع، ومن خلالها يمكن معرفة فضاء العمل حيث يظهر البرنامج إنذاراً عند الوصول إلى القيود الميكانيكية».


ويتابع: «التصميم يهدف إلى تنفيذ روبوت سداسي الأرجل قادر على السير في كافة الاتجاهات والدوران في المكان، مع تغيير في هيئة الروبوت أثناء الحركة لتمكينه من النزول تحت عائق، وتسلق العقبات، والصعود على المرتفعات، والسير فوق أرض وعرة نسبياً، ويستخدم الروبوت في العديد من التطبيقات الحياتية منها استكشاف البيئة المحيطة عن طريق إرسال روبوت لاستكشافها من خلال إضافة كاميرا وإعطاء الروبوت الأوامر التي نريدها كالمشي إلى الأمام أو الخلف وبجميع الاتجاهات، ويتميز بقدرته على التنقل بسهولة والقيام بحركات متنوعة، وهو قابل للتطوير بإضافة كاميرات، وحساسات لمس عند نهاية الأرجل لكشف وصوله إلى الأرض، وقابلية اكتشاف ارتفاع العائق المرتفع نسبياً، وتطبيق خوارزمية الصعود ذاتياً».
وعن مراحل إنجاز المشروع قال: «استغرق إنجاز الروبوت سبعة أشهر، في الشهر الأول عملت بمتابعة آلية الحركة بالتفصيل وبدقة واخترت المحركات وطلبتها من الخارج لعدم توافرها في "سورية"، بينما في الشهر الثاني قمت بتطوير البرنامج وتجهيز الدارة، وعند الانتهاء من تجهيزها حصلت على المحركات وبدأت مرحلة التطبيق والتجريب، وهنا تكمن الخطورة والصعوبة حيث قمت بمراجعة جميع الحسابات وتخيلت كيفية الحركة لمنع حصول أي خطأ».

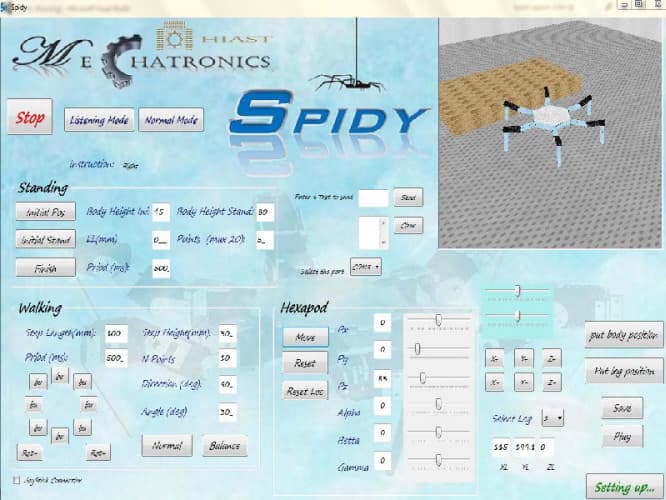
وفي حديث مع الدكتور "أحمد المالح" عضو لجنة البحث العلمي، ومعاون رئيس قسم النظم الإلكترونية والميكانيكية في "المعهد العالي للعلوم التطبيقية والتكنولوجيا"، عبر عن رأيه بالروبوت ويقول: «يصنف مشروع تخرج المهندس "عهد البدين" على أنه أحد أهم المشاريع العلمية العالمية في مجال بحوث الروبوتيك، حيث يضم كل العناصر الأساسية في مشاريع الأنظمة الميكاترونية، وهي: التصميم الميكانيكي بمعونة الحاسوب، وعلوم الروبوتيك، الحسابات الحركية والديناميكية الخاصة بنموذج الروبوت، يضاف إلى ذلك منظومة التحكم بأنواعه الثلاثة: السلكي، واللا سلكي، وذاتي القيادة؛ التي تم تصميمها وتنفيذها من قبل المصمم وهي قادرة على التحكم بحركة 18 محركاً سيرفو بآن واحد، وتتميز الواجهة التخاطبية الحاسوبية التي تم تنفيذها خلال مراحل تنفيذ المشروع بشمولية مفاتيح التحكم للحركات التي يمكن أن يقوم بها الروبوت العنكبوتي، أضيف إليها نافذة بيانية تحاكي الحركة المطلوبة».
ويضيف: «للمشروع أهمية كبيرة حيث يستطيع جسم الروبوت الولوج إلى أماكن لا يمكن للإنسان الوصول إليها، مع إمكانية تجاوز العوائق المادية حتى ارتفاع 100مم.
وأعتقد أنه يعد قفزة نوعية في مجال علوم الروبوتيك، ويتطلب من جميع المهتمين والمعنيين، المساهمة في تبني تطوير وإغناء هذه التجربة، لتنتقل من مشروع مخبري إلى منتجات بمهمات مختلفة».