
رغبة منهم بتطبيق العلوم النظرية التي تلقوها خلال سنواتهم الدراسية؛ قرّر فريق من طلاب هندسة التحكم والأتمتة بجامعة "دمشق" أن يطبق فكرة روبوت يمتلك مهارات اللاعب المحترف بكرة الريشة من حيث قدرته على ضرب وتحديد مسار الجسم الطائر، فكرة حصدت إعجاب الكثيرين من العاملين بهذا المجال؛ لبساطتها وصعوبة التنفيذ.
مدونة وطن "eSyria" تواصلت بتاريخ 16 تشرين الأول 2017، مع المهندس "أحمد جعفر" خريج هندسة تحكم وأتمتة في جامعة "دمشق" 2017، والمشارك بالمسابقات العالمية ACM، فقال عن المشروع: «أتت الفكرة من مواقع التواصل الاجتماعي لطلاب التقانة في جامعة بـ"الصين"، وأعجبتنا الفكرة، وتناقشنا حول مدى إمكانية تنفيذها وتطبيقها، وبتشجيع من المشرف الدكتور "رؤوف حمدان" طرحنا الفكرة كمشروع تخرج. في البداية وجدنا صعوبة في العمل؛ لندرة الدراسة حول هذا المشروع، ما عدا الفيديو الوحيد الذي انتشر على مواقع التواصل الاجتماعي. وتكمن أهمية المشروع بالعمل على تقنيات كثيرة ومتطورة وتطبيق معظم العلوم التي يتم تدريسها في الجامعة، وبوجه عام فوائده تتعدى لعب الريشة، حيث تم جمع تقنيات الملاحقة وتحديد الموقع والروبوتيك في تطبيق لعبة الريشة، ويمكن استخدام هذه التقنيات في عدد واسع وكبير جداً من المشاريع التي تعتمد على إدراك البيئة المحيطة وتوقع الأحداث التي تحتاج إلى نظام تحديد موقع للقيام بمهامها، مثل روبوت الطائرة رباعية المراوح، أو أي روبوت آخر. ونستطيع أن نقول إن تتبّع جسماً متحركاً واستنتاج مساره واعتراضه بالزمن الحقيقي له تطبيقات عسكريه كبيرة».
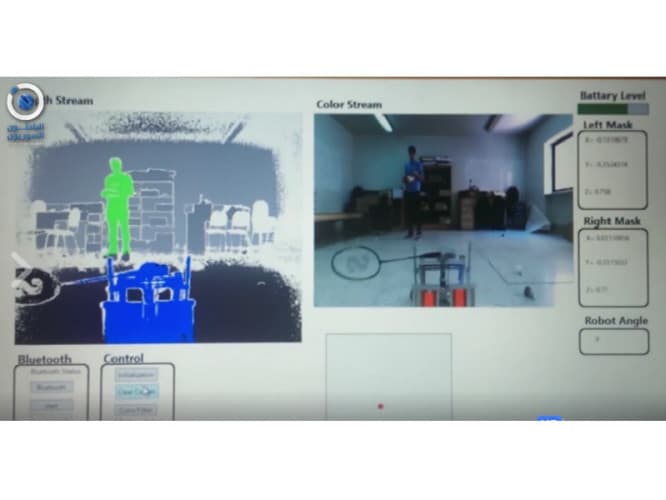
لتحقيق المهمة الأولى لكشف وملاحقة الريشة، يتم التقاط صور ثلاثية الأبعاد، وبعدها تتم معالجة الصور الملتقطة من أجل كشف وتحديد مكان الريشة في الصورة، وبعد تحديد مكان الريشة بعدة صور متتالية يتم توقع مسارها ومكان السقوط وزمنه عن طريق خوارزميات رياضية
وأضاف: «يعمل الروبوت على تحقيق هدفه الممثل بضرب الريشة بتكامل ثلاثة أنظمة: أولاً التعرّف إلى البيئة المحيطة، وتحديد الجسم الطائر في الوقت الحقيقي، وتوقع مساره وزمن سقوطه واعتراضه بالزمن الحقيقي، ثانياً نظام تحديد موقع الروبوت بدقة عالية وبالزمن الحقيقي، ثالثاً القدرة الفائقة على التحرك في جميع الاتجاهات بسبب استخدام عجلات نستطيع تحريكها بكافة الجهات».



خريج كلية هندسة الحواسيب والأتمتة المهندس "عمر الجبة"، عضو في الفريق، قال: «لتحقيق المهمة الأولى لكشف وملاحقة الريشة، يتم التقاط صور ثلاثية الأبعاد، وبعدها تتم معالجة الصور الملتقطة من أجل كشف وتحديد مكان الريشة في الصورة، وبعد تحديد مكان الريشة بعدة صور متتالية يتم توقع مسارها ومكان السقوط وزمنه عن طريق خوارزميات رياضية».
وتابع: «المهمة الأساسية الثانية هي اعتراض الريشة، ويتم إرسال الروبوت إلى الموقع المطلوب، ولتحقيق هذا الغرض يجب أولاً معرفة وتحديد مكان الروبوت في البيئة المحيطة بدقة؛ وذلك من أجل إرسال الأوامر التحكمية المناسبة، ولهذا تم بناء نظام تحديد الموقع الداخلي عن طريق الصور الملتقطة وبتطبيق مجموعة خوارزميات رياضية. الجدير بالذكر، أن نظام تحديد الموقع باستخدام حساس رؤية تم بناؤه، وهو الأول من نوعه، ولم يتم بناؤه بالاعتماد على أبحاث سابقة في هذا المجال».
خريج هندسة التحكم والأتمتة المهندس "مجد وردة"، عضو في الفريق، يتابع: «تم اعتماد تصميم ميكانيكي يعتمد على عجلات تستطيع الحركة بكافة الاتجاهات من دون الحاجة إلى تغير زاوية دوران الروبوت. كما تم تصميم آلية لمضرب الريشة بحركة تشابه إلى حدّ ما آلية حركة المضرب عند لاعب الريشة؛ وذلك باستخدام محرك ونوابض لتحقيق الارتداد، وتم بناء نظام تحكم يستخدم متحكماً صغرياً يستقبل الأوامر من الحاسوب عن طريق البلوتوث من أجل تحريك الروبوت بالجهة والسرعة المطلوبة، وتم أيضاً صناعة مرمزات لقراءة سرعة المحركات بتكلفة زهيدة، وهي عملية صعبة نسبياً».
بالعودة إلى المهندس "جعفر" تحدث عن الصعوبات التي واجهت فريق العمل بالقول: «عدم وجود أبحاث ومشاريع مشابهة على الإنترنت زاد الصعوبة والوقت المطلوب لتنفيذ المشروع، إضافة إلى غلاء أسعار القطع والتجهيزات؛ وهو ما اضطرنا إلى استعارة بعض القطع من الجامعة، وصناعة بعض التجهيزات يدوياً، مثل مرمزات العجلات، وفي حالات أخرى استخدام قطع بمواصفات متوسطة بدل الممتازة، مثل محركات العجلات».
المدونة تواصلت مع الدكتور "رؤوف حمدان" اختصاص رؤية حاسوبية في قسم هندسة الحاسبات والأتمتة بجامعة "دمشق"، والمشرف على المشروع، فقال: «العمل جماعي، وقد جمعتهم رغبتهم بتطبيق التقنيات التي تلقوها نظرياً في الجامعة، والفريق متكامل، ويمتلك روح المبادرة، وهم أصحاب فكرة "روبوت لاعب ريشة"، واستطاعوا أن يصمموا وينفذوا ضمن الإمكانات المتاحة. مشروع ناجح يستطيع أن يرد الكرة برشاقة. معروف عن فريق العمل أنهم طلاب أكفاء استطاعوا أن يثبتوا أنفسهم؛ إذ دخلوا المسابقات البرمجية، ومنهم من تأهل إلى العالمية، كما أنهم خاضوا مضمار الأولمبياد العلمي بمسابقات الروبوت، وحققوا مراتب متقدمة ودرّبوا عدة فرق، وعليه الخبرة بمجال الميدان العملي لم تكن تنقصهم، وكانوا يلجؤون إلى استشارتي من وقت إلى آخر بعد أن يكونوا قاموا بعملية بحث وتجريب كاملة. المهندس "وردة" كان مسؤولاً عن العتاد الصلب المكون من المحركات ودارات القيادة ومجموعة من المتحكمات التي يمكن برمجتها، أما "الجبة"، فهو مسؤول عن الرؤية لتحديد مسار كرة الريشة والتنبؤ بمكان سقوطها، و"جعفر" مسؤول عن كل ما يتعلق بالخوارزميات والبرمجة، وفي البداية عمل محاكاة قبل التطبيق؛ فهو كان صلة الوصل بين "الهارد وير" و"السوفت وير".
الفكرة تعطي انطباعاً بأنها بسيطة وجميلة، لكنها تتضمن الكثير من التقنيات التي أخذت منهم عملاً وبحثاً يفوق الثلاثة أشهر، هناك معدات تمت استعارتها من مخبر الروبوت بالجامعة، وهناك معدات اشتروها على نفقتهم الخاصة، لرغبتهم بترك بصمة علمية في نهاية مسيرتهم الدراسية».
الجدير بالذكر، أن المشروع نال علامة 93%، وأن "أحمد جعفر" من مواليد "دمشق" عام 1994، و"عمر الجبة" من مواليد عام 1995، و"مجد وردة" من مواليد 1994.